



Laser Beam Stabilization System激光稳定系统
激光稳定系统可用于抵消或纠正由振动、冲击震动、热量漂移,或其他对激光方位有不良影响的因素引起的变化。该系统可应用于所有激光设备和激光系统中。
系统组成:
电子控制系统
压电控制转向镜
探测器

简要描述:我们提供用于激光束的实时稳定,对准,定位和调整的系统。我们的系统非常精确,快速且非常稳定。用户交互不是必需的。它们具有有用的操作和安全功能,可快速集成到不同的激光设置中。
产品介绍
产品
激光束
通信和可视化软件
“紧凑型”系统的探测器
可见光探测器
宽强度4QD探测器
紫外激光器探测器
IR和MIR激光器的探测器
用于“紧凑”系统的驱动镜
PKS驱动镜架
PSH驱动镜架
P4S30驱动镜架
用于较大镜子的驱动镜架
真空适应
更多激光元件
激光快门
实时位置检测器“XY4QD”
工作原理
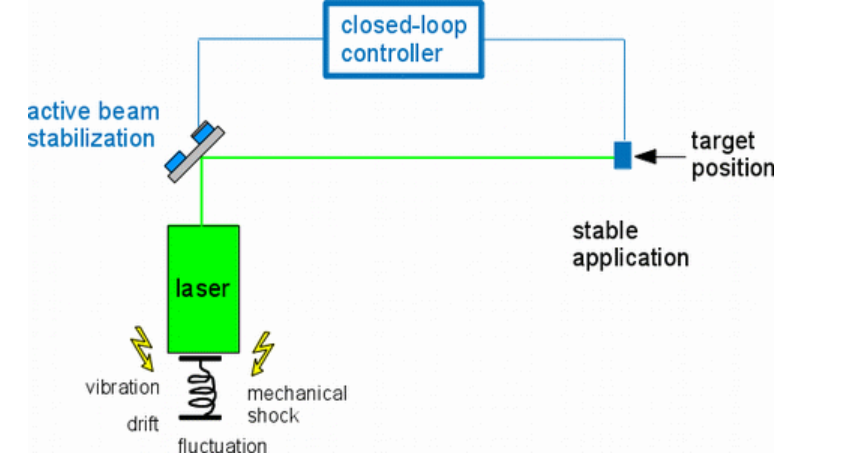
工作原理如下图所示:镜片在位置灵敏探测器的驱动下,调整激光光束到方向。

光束稳定系统自动调整激光光束到一个位置,同时系统也实时的平衡激光光束的方向变化和稳定光的位置,这意味着对内部和外部的振动源以及激光束错位或指向快速自动校正的有源补偿。
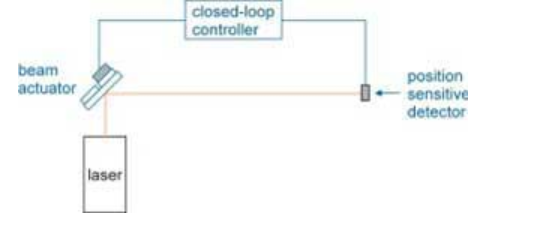
他们利用一个或两个压电控制镜致动器和位置敏感的4象限二极管。在设置一个4象限二极管中,二极管的位置靠近一个应用,这里一个稳定的光束的位置是必须的。通过加上第二个探测器和光梭,激光光束能传递到第二个应用。
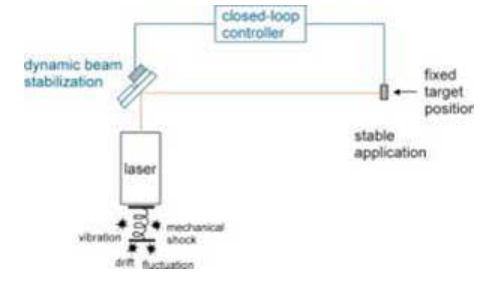
如果此应用对角度偏差高度敏感,那第二个带4象限的压电驱动镜片能用于固定空间的两个点。
应用举例
激光漂移补偿:动态光束稳定系统消除了由于振动、激光束方向的重大改变的机械冲击、热漂移及其他影响激光输出的波动。

所有系统的共同特点
· 闭环主动控制
· 对连续和脉冲激光的定位
· 对超快激光器(ps,fs)的定位
· 控制电路能针对不同的频率进行优化
· 系统可以适应可变的激光功率和波长
· 镜架可以手动调整以便快速预对准
· 控制范围和精度取决于反射镜和检测器之间的距离和光束的大小
· 柔性连接器
· OEM 版本可定制
“简洁型”稳定系统
特殊功能
· 非常紧凑
· 非常稳定
· 不需用户互动
· 成本效益的解决方案
· 可以使用不同的驱动器
规格
· 调整时间:实时操作
· 范围:压电促动器最大倾斜为2mrad
· 控制器、高电压电源和压电放大器整合在一个很紧凑的盒子里(卡片大小)
· 激光功率水平直接在探测器上显示
· 位置数据输出
· 额外的操作和安全特性(参照操作手册)
“动态”稳定系统


特殊功能
· 高带宽
· 非常稳定
· 不需用户互动
· 聚合在19寸箱内
· 适用于非常低的激光功率
规格
· 调整时间:实时操作
· 范围:压电促动器最大倾斜为2mrad
· 控制器、高电压电源和压电放大器整合在一个19寸箱内.
· 激光功率水平直接在探测器上显示
· 位置数据输出
· 额外的操作和安全特性(参照操作手册)
· 高灵敏度探测器(低至几十nJ或几nW)
“动态-2”规格
· 带宽高达1KHz
· 倾斜角度范围高达:4mrad
"XY4QD"实时位置检测器


该检测器具有综合信号处理功能,决定了激光波动具有高的空间分辨率和时间分辨率。允许单个激光脉冲的检量,因此,该位置检测器能够使表征和质量保证激光器。任选的检测器可以配备LED显示用于功率电平,x和y位置
实时位置检测器规格
· 带宽 > 100 kHz
· 敏感区域: 10 mm x 10 mm
· 谱宽: 320 - 1,100 nm
· 长宽高: 50 mm x 41 mm x 20 mm
· 连接器: MCX
激光快门"Beamblock"


激光快门系统“Beamblock”是专为阻止激光束而设计的,它包括激光快门和快门控制单元,它有不同的操作模式(外控、确认、手动)
快门规格
· 孔径: 10 mm
· 连接器: LEMO 00
· 长宽高: 55 mm x 38 mm x 50 mm
· 重量: 190 g
快门控制规格
· 输入 "OK/external":逻辑 / TTL水平,插座LEMO 00
· 输出 "Shutter": 0V / 12V, 插座LEMO 00
· 长宽高: 90 mm x 58 mm x 38 mm
· 重量: 120 g
系统数据
· 光束释放开启时间: 15 ms
· 光束阻止关闭时间: 48 ms
客户定制


我们也提供客户定制版本,他下面的照片显示了一个小型化的快门,用于空间有限的紧凑集成。
上图微型快门的数据
· 孔径: 5mm
· 双稳态设计
· 长宽高: 25 mm x 12 mm x 10 mm
· 重量: 7g
· 螺纹: M2
“自学习”激光光束定位用于移动目标


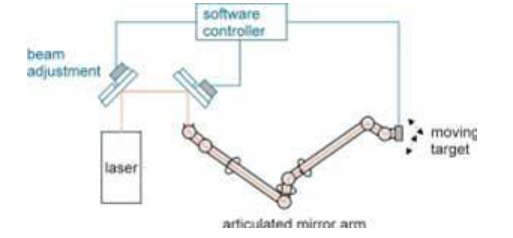
该系统是基于一个微控制器和一个自学习软件算法。该算法应用一个标准的两反射镜对准过程的方法,快速找到调整的激光束的检测器的正交轴。
它使用两个picomotortm 驱动镜片和两个位置敏感的4象限二极管。通过4象限二极管,镜片调整光束到位置。在预先设置时,二极管直接连接一个变化的空间定位仪。
应用实例:
通过关节镜臂实现光束对准,“自学习”光束定位仪决定目标的方向和调整激光光束到光轴上。这个设置可以弥补关节镜臂的机械公差

规格
· 调整时间:由激光参数、检测器和镜片的角度和所需精度决定
· 范围:picomotorTM的倾斜角>10°然而,最大的倾斜角由检测器的距离限定
· 显示激光的功率.